Specification for ReactionWheelJitter class
1. Overview
ReactionWheelJitterclass simulates the high-frequency jitter of Reaction Wheels.- This class uses:
- Angular velocity of the RW
- Parameters of RW disturbance measured by experiments
- This class returns:
- RW jitter forces and torques in the component frame
- RW jitter forces and torques in the body frame
1. functions
CalcJitter- Simulates the reaction wheel jitter
- (If Enabled) Calls
AddStructuralResonance(). This function adds the effect of structural resonance to the high-frequency disturbance of RW. You can choose to consider the effect of structural resonance or not.
2. files
reaction_wheel_jitter.cpp,reaction_wheel_jitter.hppreaction_wheel.iniradial_force_harmonics_coefficients.csv,radial_torque_harmonics_coefficients.csv- These files contain the harmonic coefficients from experiments.
3. how to use
- Set the harmonics coefficients in
radial_force_harmonics_coefficients.csvandradial_torque_harmonics_coefficients.csv - The first column is an array of the $h_i$( $i$-th harmonic number). The second column is an array of the $C_i$ (amplitude of the $i$-th harmonic).
- Set parameters in
reaction_wheel.ini - When only the static imbalance and dynamic imbalance(correspond to $C_i$ at $h_i\ne1$) is known according to the spec sheet, edit the files as follows.
radial_force_harmonics_coefficients.csv- Set $h_1$(the line 1 of the first column) as $1.0$.
- Set $C_1$(the line 1 of the second column) as the static imbalance on the spec sheet.
radial_torque_harmonics_coefficients.csv- Set $h_1$(the line 1 of the first column) as $1.0$.
- Set $C_1$(the line 1 of the second column) as the dynamic imbalance on the spec sheet.
reaction_wheel.ini- Set
harmonics_degree = 1.
- Set
- Set the jitter update period to an appropriate value.
- Jitter update period is equal to the product of
CompoUpdateIntervalSecinsimulation_base.iniandfast_prescalerinreaction_wheel.ini. - For correct calculation, the update period of the jitter should be set to approximately 0.1ms.
- A larger update period is not a problem, but it will cause aliasing in the jitter waveform.
- Jitter update period is equal to the product of
2. Explanation of Algorithm
1. CalcJitter
1. overview
- Function to calculate jitter force and torque
2. input and output
- input
- angular velocity of the RW
- output
- jitter force and torque in the component frame
- jitter force and torque in the body frame
3. algorithm
- The disturbances consist of discrete harmonics of reaction wheel speed with amplitudes proportional to the square of the wheel speed:
\[ u(t)=\sum_{i=1}^n C_i\Omega^2\sin(2\pi h_i\Omega t+\alpha_i) \]
- where $u(t)$ is the disturbance force and torque in Newton (N) or Newton-meters (Nm), $n$ is the number of harmonics included in the model, $C_i$ is the amplitude of the $i$ th harmonic in $\mathrm{N^2/Hz}$ (or $\mathrm{(Nm)^2/Hz}$), $\Omega$ is the wheel speed in Hz, $h_i$ is the $i$ th harmonic number and $\alpha_i$ is a random phase (assumed to be uniform over $[0, 2\pi]$) [1].
- $\alpha_i$ is generated as a uniform random number in the constructor.
- When users want to use a more precise model, set
considers_structural_resonanceto ENABLE inRW.iniand use a model that takes structural resonance inside the RW into account.- If structural resonances are not taken into account, the RW disturbance will be underestimated, but it is not a significant change in general.
- See the description of
AddStructuralResonance()for the algorithm to calculate the structural resonance.
2. AddStructuralResonance()
1. overview
- Function to add structural resonance inside the RW on the disturbance by harmonics of RW
2. input and output
- input:
- N/A
- output:
- jitter force and torque with structural resonance in component frame
3. algorithm
- The transfer function from disturbance by harmonics of RW without resonance ( $u(t)$ ) to disturbance with resonance ( $y(t)$ ) is modeled as following equation: \[ G(s)=\frac{s^2+2\zeta\omega_ns+\omega_n^2}{s^2+2d\zeta\omega_ns+\omega_n^2} \] \[ Y(s)=G(s)U(s) \]
- where $\omega_n$ is the angular frequency on the structural resonance. Other parameters such as $\zeta$, $d$ are determined by the result of experiments.
- To perform the simulation in discrete time, A bi-linear transformation $G(s)\rightarrow H(z)$ is applied. $T$ is the jitter update period.
\[ \begin{aligned} G(\frac{2}{T}\frac{z-1}{z+1})&=\dfrac{(\frac{2}{T}\frac{z-1}{z+1})^2+2\zeta\omega_n(\frac{2}{T}\frac{z-1}{z+1})+\omega_n^2}{(\frac{2}{T}\frac{z-1}{z+1})^2+2d\zeta\omega_n(\frac{2}{T}\frac{z-1}{z+1})+\omega_n^2}\\ &=\dfrac{(4+4\zeta T\omega_n+T^2\omega_n^2)+(-8+2T^2\omega_n^2)z^{-1}+(4-4\zeta T\omega_n+T^2\omega_n^2)z^{-2}}{(4+4d\zeta T\omega_n+T^2\omega_n^2)+(-8+2T^2\omega_n^2)z^{-1}+(4-4d\zeta T\omega_n+T^2\omega_n^2)z^{-2}}\\ &=\dfrac{c_3+c_4z^{-1}+c_5z^{-2}}{c_0+c_1z^{-1}+c_2z^{-2}}\\ &=H(z) \end{aligned} \]
- The $\omega_n$ should be the fixed value by pre-warping because there is frequency distortion due to bilinear transformation. The formula for calculating $\omega_n$ for the true resonant frequency $\omega_d$ is as follows:
\[ \omega_n=\frac{2}{T}\tan(\frac{T\omega_d}{2}) \]
- The bi-linear transformation transforms the relationship between input $u$ and output $y$ as follows:
\[ \begin{aligned} Y(z)&=H(z)U(z)\\ (c_0+c_1z^{-1}+c_2z^{-2})Y(z)&=(c_3+c_4z^{-1}+c_5z^{-2})U(z) \end{aligned} \]
-
By applying the inverse z-transform, the continuous relationship between $y(t)$ and $u(t)$ can be expressed as a discrete relationship of a difference equation between $y[n]$ and $u[n]$, where $[n]$ is the current simulation time step. The difference equation is as follows: \[ c_0y[n]+c_1y[n-1]+c_2y[n-2]=c_3u[n]+c_4u[n-1]+c_5u[n-2] \]
-
Therefore, $y[n]$ is calculated as follows. \[ y[n]=\frac{(-c_1y[n-1]-c_2y[n-2]+c_3u[n]+c_4u[n-1]+c_5u[n-2])}{c_0} \]
3. Results of verifications
- In this section, jitter output when the RW is rotated at a constant speed is verified.
1. X-axis torque data in the time domain
1. overview
- The RW model is rotated at 4000 rpm, 6000 rpm, and 8000 rpm, and the disturbance torque is compared with the actual experiment.
2. initial condition
- input files
sample_simulation_base.inireaction_wheel.ini
- initial condition
sample_simulation_base.iniEndTimeSec = 0.5 StepTimeSec = 0.0001 CompoUpdateIntervalSec = 0.0001 LogOutputIntervalSec = 0.0001reaction_wheel.inifast_prescaler = 1 max_angular_velocity = 9000.0 calculation = ENABLE logging = ENABLE harmonics_degree = 12 considers_structural_resonance = ENABLE structural_resonance_freq = 585.0 //[Hz] damping_factor = 0.1 //[ ] bandwidth = 0.001 //[ ]
3. result
- The simulation result is compared with the disturbance experiment result of Sinclair RW0.003.
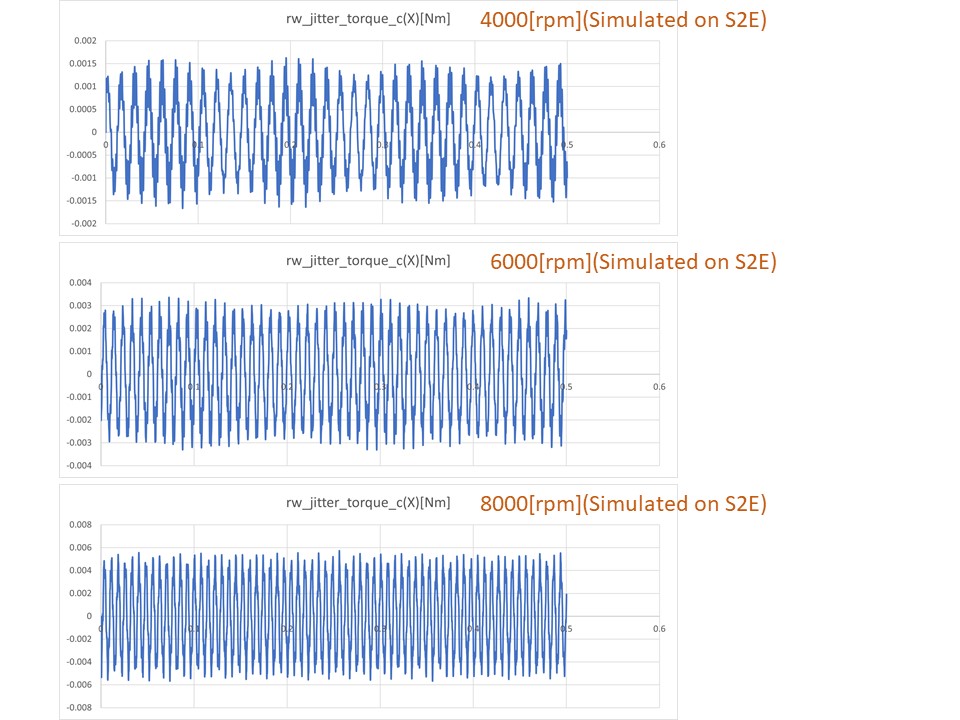
- At all speeds, the characteristics of the actual RW are well simulated.
2. X-axis torque waterfall
1. overview
- The RW model is rotated at 1000, 2000, ..., 9000rpm, and the jitter torque time-domain data was extracted. Then, FFT was applied to the data by Matlab, and the waterfall plot was plotted.
2. initial condition
- same as the initial condition of the verification about the time domain data
3. result
- The simulation result is compared with the disturbance experiment result of Sinclair RW0.003.
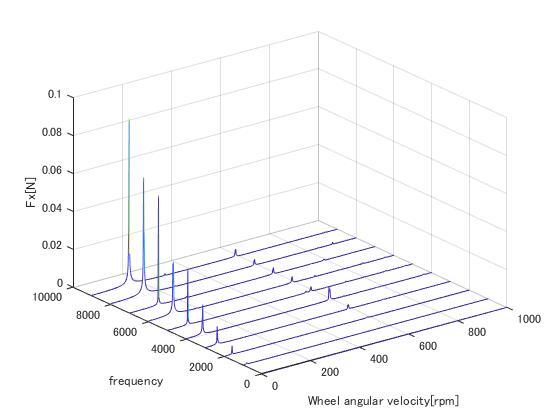
- Both the first-order mode and the structural resonance ($\omega_n=585\mathrm{Hz}$) are approximately simulated.
4. References
- Masterson, R. A. (1999). Development and validation of empirical and analytical reaction wheel disturbance models (Doctoral dissertation, Massachusetts Institute of Technology).
- Shields, et al., (2017). Characterization of CubeSat reaction wheel assemblies. Journal of Small Satellites, 6(1), 565-580.