Specification for Kepler Orbit Propagation
1. Overview
1. Functions
- The
KeplerOrbitclass calculates the satellite position and velocity with the simple two-body problem. We ignored any disturbances and generated forces by the satellite. - This orbit propagation mode provides the simplest and fastest orbit calculation for any orbit(LEO, GEO, Deep Space, and so on.).
2. Files
src/dynamics/orbit/orbit.hpp, cpp- Definition of
Orbitbase class
- Definition of
src/dynamics/orbit/initialize_orbit.hpp, .cpp- Make an instance of orbit class.
src/dynamics/orbit/kepler_orbit_propagation.hpp, .cpp- Libraries
src/library/orbit/kepler_orbit.cpp, hppsrc/library/orbit/orbital_elements.cpp, hpp
3. How to use
- Select
propagate_mode = KEPLERin the spacecraft's ini file. - Select
initialize_modeas you want.DEFAULT: Use default initialize method (RK4andENCKEuse position and velocity,KEPLERuses init_mode_kepler)POSITION_VELOCITY_I: Initialize with position and velocity in the inertial frameORBITAL_ELEMENTS: Initialize with orbital elements
2. Explanation of Algorithm
1. KeplerOrbit::CalcConstKeplerMotion function
1. Overview
- This function calculates the following constant values.
- Mean motion
- Frame conversion matrix from in-plane position to the inertial frame position
2. Inputs and outputs
- Input
- Orbital Elements
- $\mu$ : The standard gravitational parameter of the central body
- Output
- $n$ : Mean motion
- $R_{p2i}$ : Frame conversion matrix from in-plane position to the inertial frame position
3. Algorithm
- Mean motion \[ n = \sqrt{\frac{\mu}{a^3}} \]
- Frame conversion matrix from in-plane position to ECI position \[ R_{p2i} = R_z(-\Omega)R_x(-i)R_z(-\omega) \] \[ R_x(\theta) = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \cos{\theta} & \sin{\theta} \\ 0 & -\sin{\theta} & \cos{\theta} \end{pmatrix} \] \[ R_z(\theta) = \begin{pmatrix} \cos{\theta} & \sin{\theta} & 0 \\ -\sin{\theta} & \cos{\theta} & 0 \\ 0 & 0 & 1 \end{pmatrix} \]
2. KeplerOrbit::CalcOrbit function
1. Overview
- This function calculates the position and velocity of the spacecraft in the inertial frame at the designated time.
2. Inputs and outputs
- Input
- $t$ : Time in Julian day
- Orbital Elements
- Constants
- Output
- $\boldsymbol{r}_{i}$ : Position in the inertial frame
- $\boldsymbol{v}_{i}$ : Velocity in the inertial frame
3. Algorithm
- Calculate mean anomaly $l$[rad] \[ l = n * (t-t_{epoch}) \]
- Calculate eccentric anomaly $u$[rad] by solving the Kepler Equation
- Details are described in
KeplerOrbit::SolveKeplerFirstOrder
- Details are described in
- Calculate two dimensional position $x^{*}$, $y^{*}$ and velocity $\dot{x}^{*}$, $\dot{y}^{*}$ in the orbital plane \[ \begin{align} x^* &= a(\cos{u}-e)\\ y^* &= a\sqrt{1-e^2}\sin{u}\\ \dot{x}^* &= -an\frac{\sin{u}}{1^e\cos{u}}\\ \dot{y}^* &= an\sqrt{1-e^2}\frac{\cos{u}}{1^e\cos{u}}\\ \end{align} \]
- Convert to the inertial frame \[ \begin{align} \boldsymbol{r}_{i} &= R_{p2i}\begin{bmatrix} x^* \\ y^* \\ 0 \end{bmatrix}\\ \boldsymbol{v}_{i} &= R_{p2i}\begin{bmatrix} \dot{x}^* \\ \dot{y}^* \\ 0 \end{bmatrix}\\ \end{align} \]
3. KeplerOrbit::SolveKeplerFirstOrder function
1. Overview
- This function solves the Kepler Equation with the first-order iterative method.
- Note: This method is not suited to the high eccentricity orbit. It is better to use the Newton-Raphson method for such a case.
- From
v6.0.0we haveSolveKeplerNewtonMethodand use it. The detail of the method will be write.
- From
2. Inputs and outputs
- Input
- $e$ : eccentricity
- $l$ : mean anomaly [rad]
- $\epsilon$ : threshold for convergence [rad]
- Limit of iteration
- Output
- $u$ : eccentric anomaly [rad]
3. Algorithm
- Set the initial value of eccentric anomaly as follows
- $u_0=l$
- Calculate $u_{n+1}$ with the following equation \[ u_{n+1} = l + e\sin{u_n} \]
- Iterate the calculation until the following conditions are satisfied
- $|u_{n+1} - u_{n}| < \epsilon$
- The iteration number over the limit of iteration
4. OrbitalElements::CalcOeFromPosVel function
1. Overview
- This function calculates the orbital elements from the initial position and velocity in the inertial frame.
2. Inputs and outputs
- Input
- $\mu$ : The standard gravitational parameter of the central body
- $t$ : Time in Julian day
- $\boldsymbol{r}_{i}$ : Initial position in the inertial frame
- $\boldsymbol{v}_{i}$ : Initial velocity in the inertial frame
- Output
- orbital element
3. Algorithm
- $\boldsymbol{h}_{i}$ : Angular momentum vector of the orbit \[ \boldsymbol{h}_{i} = \boldsymbol{r}_{i} \times \boldsymbol{v}_{i} \]
- $a$ : Semi-major axis \[ a = \frac{\mu}{2\frac{\mu}{r} - v^2} \]
- $i$ : Inclination \[ i = \cos^{-1}{h_z} \]
- $\Omega$ : Right Ascension of the Ascending Node (RAAN)
- Note: This equation is not support $i = 0$ case. \[ \Omega = \sin^{-1}\left(\frac{h_x}{\sqrt{h_x^2 + h_y^2}}\right) \]
- $x_{p}, y_{p}$ : Position in the orbital plane \[ \begin{align} x_{p} &= r_{ix} \cos{\Omega} + r_{iy} \sin{\Omega};\\ y_{p} &= (-r_{ix} \sin{\Omega} + r_{iy} \cos{\Omega})\cos{i} + r_{iz}\sin{i} \end{align} \]
- $\dot{x}_{p}, \dot{y}_{p}$ : Velocity in the orbital plane \[ \begin{align} \dot{x}_{p} &= v_{ix} \cos{\Omega} + v_{iy} \sin{\Omega};\\ \dot{y}_{p} &= (-v_{ix} \sin{\Omega} + v_{iy} \cos{\Omega})\cos{i} + v_{iz}\sin{i} \end{align} \]
- $e$ : Eccentricity \[ \begin{align} c_1 &= \frac{h}{\mu}\dot{y}_p - \frac{x_p}{r}\\ c_2 &= -\frac{h}{\mu}\dot{x}_p - \frac{y_p}{r}\\ e &= \sqrt{c_1^2 + c_2^2} \end{align} \]
- $\omega$ : Argument of Perigee \[ \omega = \tan^{-1}\left(\frac{c_2}{c_1}\right) \]
- $t_{epoch}$ : Epoch [Julian day] \[ \begin{align} f &= \tan^{-1}\left(\frac{y_p}{x_p}\right) - \omega\\ u &= \tan^{-1}\frac{\frac{r \sin{f}}{\sqrt{1-e^2}}}{r\cos{f} + ae}\\ \end{align} \] \[ \begin{align} n &= \sqrt{\frac{\mu}{a^3}}\\ dt &= \frac{u - e\sin{u}}{n}\\ t_{epoch} &= t - \frac{dt}{246060} \end{align} \]
3. Results of verifications
1. Comparison with RK4
1. Overview
- We compared the calculated orbit result between RK4 mode and Kepler mode. In the RK4 mode, all disturbances are disabled since the Kepler mode ignores them.
- In the Kepler mode, we verified the correctness of both initialize modes (
ORBITAL_ELEMENTSandPOSITION_VELOCITY_I).
2. Conditions for the verification
- sample_simulation_base.ini
- The following values are modified from the default.
EndTimeSec = 10000 LogOutPutIntervalSec = 5
- The following values are modified from the default.
- SampleDisturbance.ini
- All disturbances are disabled.
- SampleSat.ini
- The following values are modified from the default.
propagate_modeis changed for each mode.- Orbital elements for Kepler
semi_major_axis_m = 6794500.0 eccentricity = 0.0015 inclination_rad = 0.9012 raan_rad = 0.1411 arg_perigee_rad = 1.7952 epoch_jday = 2.458940966402607e6 - Initial position and velocity (compatible value with the orbital elements)
init_position(0) = 1791860.131 init_position(1) = 4240666.743 init_position(2) = 4985526.129 init_velocity(0) = -7349.913889 init_velocity(1) = 631.6563971 init_velocity(2) = 2095.780148
- The following values are modified from the default.
3. Results
-
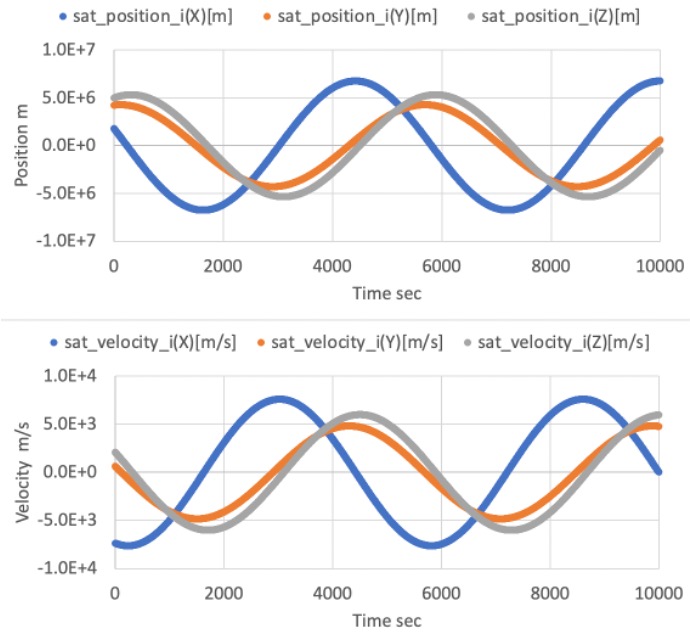
The following figure shows the orbit calculation result of Kepler mode with
ORBITAL_ELEMENTSinitialize mode.- The result looks correct.
-
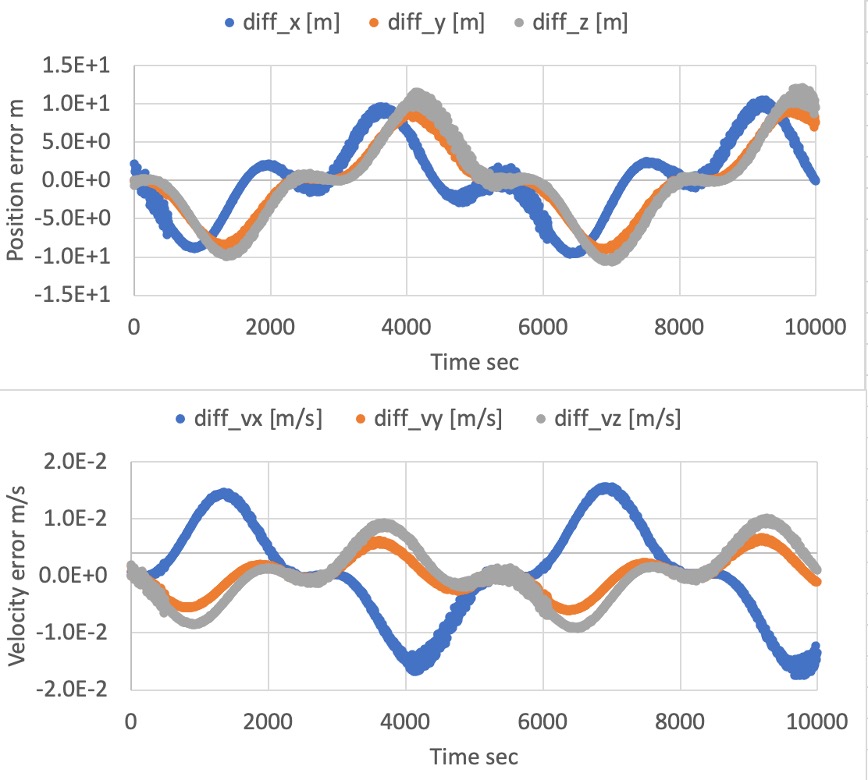
The difference between Kepler mode with
ORBITAL_ELEMENTSinitialize mode and RK4 mode is shown in the following figure.- The error between them is small (less than 10m), and we confirmed that the calculation of Kepler orbit is correct.
-
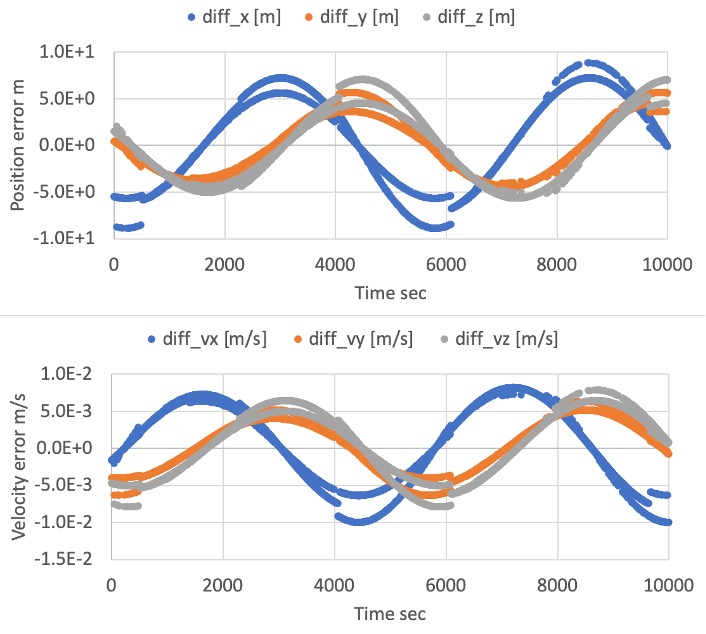
The following figure shows the difference between Kepler orbit calculation with
ORBITAL_ELEMENTSandPOSITION_VELOCITY_Iinitialize mode.- The error between them is small (less than 10m), and we confirmed that the initializing method is correct.
4. References
- Hiroshi Kinoshita, "Celestial mechanisms and orbital dynamics", ch.2, 1998 (written in Japanese)